

Anno 6 оси с сервоприводом автоматический рычаг шпю Пикер робот для литья под давлением
- Категории: Manipulator >>>
- Поставщик: Anno,Robot,(shenzhen),Co.,Ltd.

Поделиться:
Описание и отзывы
Характеристики
Product Description
Technical Parameters
Payload | 20 kg | ||
Reach | 1850 mm | ||
Structure | Articulated | ||
Number of axes | 6 | ||
Repeatability | ±0.08 mm | ||
Max. motion range | Axis 1 | ±180° | |
Axis 2 | +139°/-60° | ||
Axis 3 | +56°/-150° | ||
Axis 4 | ±360° | ||
Axis 5 | ±115° | ||
Axis 6 | ±450° | ||
Max. speed | Axis 1 | 148°/sec | |
Axis 2 | 148°/sec | ||
Axis 3 | 150°/sec | ||
Axis 4 | 222°/sec | ||
Axis 5 | 222°/sec | ||
Axis 6 | 360°/sec | ||
Body Weight | ≈250 kg | ||
Mounting type | Ground, bracket, ceiling | ||
Ambient temperature | -20 ℃~80 °C | ||
Workspace

Robot Control System

●Structural optimization algorithm suitable for the body control of various types of structure.
●Modular setting of functions
suitable for diverse applications.
●8-axis control realizes the control of external axes (traveling axes and positioner).
●Suitable for multiple increments; absolute servo.
●Suitable for multiple increments; absolute servo.
●Open structure for synchronization of international technology and extension
of functions.
of functions.
●Software PLC functions facilitate logic control.
●Process functions make programming easy. ●Improved computer bus
connection ensures reliability and practicability.
connection ensures reliability and practicability.
●Safety module ensures safe production of the robots.
●Industrial standards &reliable stability.
Storage | 2 GB |
Teaching box | Full keyboard+touch screen, mode select switch, safety switch, emergency switch |
No. of controlled axes | 6+2 axes, 6 basic axes +2 external axes |
Interface | Multiple encoder signal interfaces, dedicated interface for robot terminal, Ethernet interface, serial communication |
Safety module | The emergency and robot anomaly signals are linked to ensure rapid stop of the robot |
Mode of operation | Teaching, representation, remote control |
Mode of programming | Online teaching, process programming, teaching by dragging |
Motion function | Point-to-point, linear, circular |
Command system | Motion, logic, process, computation |
Mode of control | Position control |
Anomaly detection function | Emergency stop anomaly, servo anomaly, anti-collision, safety maintenance, arcing anomaly, user coordinate anomaly, tool coordinate anomaly |
Detailed Images
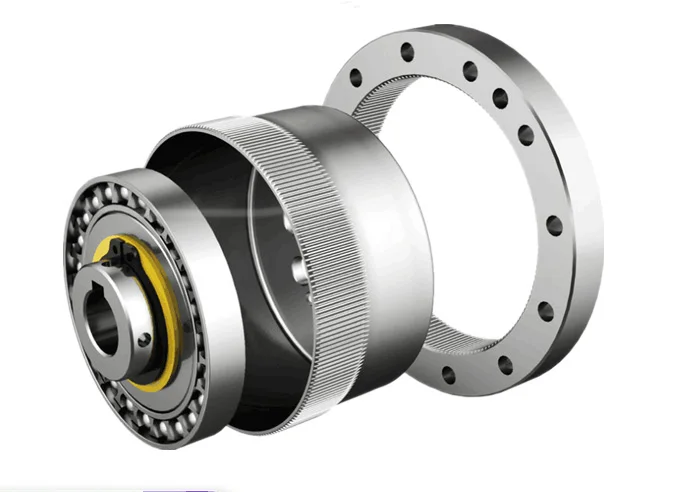
Harmonic reducer
High-precision technology, high load capacity, fast transmission speed, stable operation

HCFA Servo Motor
High-precision control, good high-speed performance and strong anti-overload capability

HCFA Driver
Control the servo motor by three methods: position, speed and torque

Controller board
Including various interfaces such as IO module, safety module, A / V analog module

Aluminum Alloy Shell
Independent design, exquisite appearance, CNC machining and casting
Main Applications
Materials handling, parts transfer, electric welding, machine management, palletizing, packaging, testing, deburring, grinding, gluing, assembly &painting

Applicable Cases
NC lathe loading &unloading
TY1850-D-6 robot has a payload of 20 kg and is widely used in handling, painting, loading and unloading for machine tools, screw tightening, surface mounting and other applications. One 6-axis robot can work independently and efficiently in cellular manufacturing processes.
The figure shows the loading and unloading of small precision parts for a lathe of a customer.
TY1850-D-6 robot has a payload of 20 kg and is widely used in handling, painting, loading and unloading for machine tools, screw tightening, surface mounting and other applications. One 6-axis robot can work independently and efficiently in cellular manufacturing processes.
The figure shows the loading and unloading of small precision parts for a lathe of a customer.

Packing&Shipping
Package: Normally we use the standard exporting packaging. We also can according to clients' request .
Shipping :
1. By Couriers: DHL, UPS, FEDEX, TNT are the main courier we are co-operating at present.
2. By Air: Delivery from the Shenzhen airport to customers' destination city air port.
3. By Sea: Delivery from the Shenzhen sea port .
Shipping :
1. By Couriers: DHL, UPS, FEDEX, TNT are the main courier we are co-operating at present.
2. By Air: Delivery from the Shenzhen airport to customers' destination city air port.
3. By Sea: Delivery from the Shenzhen sea port .



Related Products
Company Introduction
RobotAnno (ShenZhen) Co., Ltd. is a professional R & D and manufacturer of desktop robotic arm solutions. Through continuous innovation, RobotAnno is committed to providing educational robots, light industrial robots and commercial robots with cost-effective, easy-to-operate, and experiential revolutionary desktop robotic products and solutions.




FAQ
Q1. Can I have a sample order?
A: Yes, we welcome sample order to test and check quality.
Q2. What about the lead time?
A: Samples arrived often need 4-10 days.
Q3. Do you have any MOQ (minimum order quality)limit?
A: Low MOQ, 1pc for sample checking is available.
Q4. How do you ship the goods and how long does it take to arrive?
A: We often ship by DHL, UPS, FedEx or TNT. It usually takes 3-10 days to arrive. Airline and sea shipping is also optional.
Q5. How to proceed an order?
A: Initially, let us know your requirements or application. Besides, We quote according to your requirements or our suggestions.
Thirdly, customers confirms the samples and places deposit for formal order. Finally, We arrange the production.
Q6. Is it acceptable to print my logo on the product?
A: Yes. Please inform us formally before our product and confirm the design firstly based on our sample.
Q7: Do you offer guarantee for the products?
A: Yes, we offer one-year warranty for our products.
Q8: How to deal with the flaw?
A: Our products are produced in strict quality control system and the percent of pass is often maintained over 99.8%
A: Yes, we welcome sample order to test and check quality.
Q2. What about the lead time?
A: Samples arrived often need 4-10 days.
Q3. Do you have any MOQ (minimum order quality)limit?
A: Low MOQ, 1pc for sample checking is available.
Q4. How do you ship the goods and how long does it take to arrive?
A: We often ship by DHL, UPS, FedEx or TNT. It usually takes 3-10 days to arrive. Airline and sea shipping is also optional.
Q5. How to proceed an order?
A: Initially, let us know your requirements or application. Besides, We quote according to your requirements or our suggestions.
Thirdly, customers confirms the samples and places deposit for formal order. Finally, We arrange the production.
Q6. Is it acceptable to print my logo on the product?
A: Yes. Please inform us formally before our product and confirm the design firstly based on our sample.
Q7: Do you offer guarantee for the products?
A: Yes, we offer one-year warranty for our products.
Q8: How to deal with the flaw?
A: Our products are produced in strict quality control system and the percent of pass is often maintained over 99.8%

Похожие товары


Рука робота Uwant
US $200.00-$500.00





6-осевой Роботизированная рука от китайского производителя
US $6450-$7500
Новинки - Розница







